bezier.surface module¶
Helper for Bézier Surfaces / Triangles.
-
class
bezier.surface.Surface(nodes, base_x=0.0, base_y=0.0, width=1.0, _copy=True)¶ Bases:
bezier._base.BaseRepresents a Bézier surface.
We define a Bézier triangle as a mapping from the unit simplex in 2D (i.e. the unit triangle) onto a surface in an arbitrary dimension. We use barycentric coordinates
\[\lambda_1 = 1 - s - t, \lambda_2 = s, \lambda_3 = t\]for points in
\[\left\{(s, t) \mid 0 \leq s, t, s + t \leq 1\right\}.\]As with curves, using these weights we get convex combinations of points \(v_{i, j, k}\) in some vector space:
\[B\left(\lambda_1, \lambda_2, \lambda_3\right) = \sum_{i + j + k = d} \binom{d}{i \, j \, k} \lambda_1^i \lambda_2^j \lambda_3^k \cdot v_{i, j, k}\]Note
We assume the nodes are ordered from left-to-right and from bottom-to-top. So for example, the linear triangle:
(0,0,1) (1,0,0) (0,1,0)
is ordered as
\[\begin{split}\left[\begin{array}{c c c} v_{1,0,0} & v_{0,1,0} & v_{0,0,1} \end{array}\right]^T\end{split}\]the quadratic triangle:
(0,0,2) (1,0,1) (0,1,1) (2,0,0) (1,1,0) (0,2,0)
is ordered as
\[\begin{split}\left[\begin{array}{c c c c c c} v_{2,0,0} & v_{1,1,0} & v_{0,2,0} & v_{1,0,1} & v_{0,1,1} & v_{0,0,2} \end{array}\right]^T\end{split}\]the cubic triangle:
(0,0,3) (1,0,2) (0,1,2) (2,0,1) (1,1,1) (0,2,1) (3,0,0) (2,1,0) (1,2,0) (0,3,0)
is ordered as
\[\begin{split}\left[\begin{array}{c c c c c c c c c c} v_{3,0,0} & v_{2,1,0} & v_{1,2,0} & v_{0,3,0} & v_{2,0,1} & v_{1,1,1} & v_{0,2,1} & v_{1,0,2} & v_{0,1,2} & v_{0,0,3} \end{array}\right]^T\end{split}\]and so on.
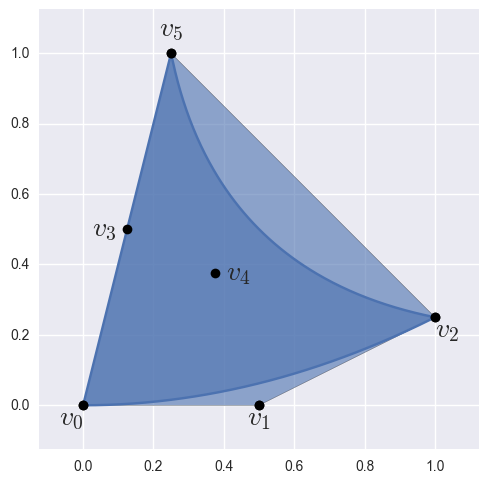
>>> import bezier >>> nodes = np.array([ ... [0.0 , 0.0 ], ... [0.5 , 0.0 ], ... [1.0 , 0.25 ], ... [0.125, 0.5 ], ... [0.375, 0.375], ... [0.25 , 1.0 ], ... ]) >>> surface = bezier.Surface(nodes) >>> surface <Surface (degree=2, dimension=2)>
Parameters: - nodes (numpy.ndarray) – The nodes in the surface. The rows represent each node while the columns are the dimension of the ambient space.
- base_x (
Optional[float]) – The \(x\)-coordinate of the base vertex of the sub-triangle that this surface represents. - base_y (
Optional[float]) – The \(y\)-coordinate of the base vertex of the sub-triangle that this surface represents. - width (
Optional[float]) – The width of the sub-triangle that this surface represents. - _copy (bool) – Flag indicating if the nodes should be copied before
being stored. Defaults to
Truesince callers may freely mutatenodesafter passing in.
-
area¶ float: The area of the current surface.
Raises: NotImplementedError– If the area isn’t already cached.
-
width¶ float: The “width” of the parameterized triangle.
When re-parameterizing (e.g. via
subdivide()) we specialize the surface from the unit triangle to some sub-triangle. After doing this, we re-parameterize so that that sub-triangle is treated like the unit triangle.To track which sub-triangle we are in during the subdivision process, we use the coordinates of the base vertex as well as the “width” of each leg.
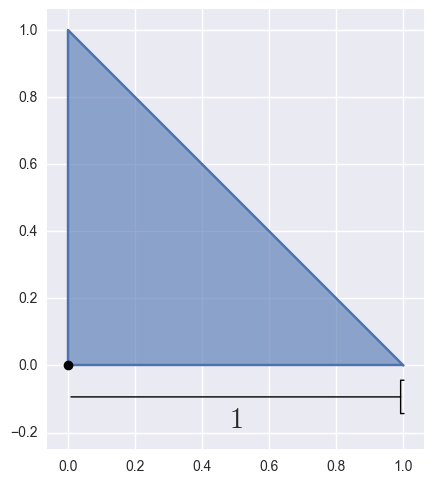
>>> surface.base_x, surface.base_y (0.0, 0.0) >>> surface.width 1.0
Upon subdivision, the width halves (and potentially changes sign) and the vertex moves to one of four points:
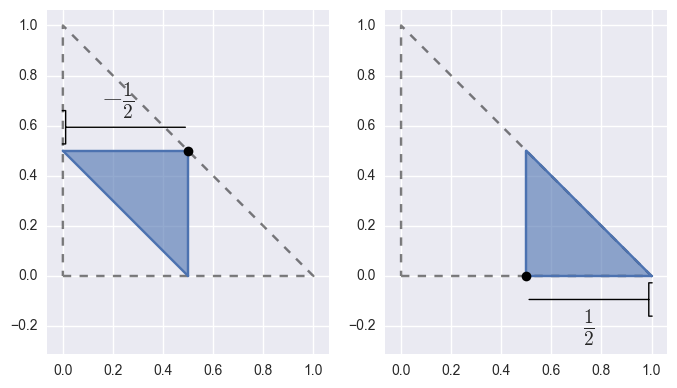
>>> _, sub_surface_b, sub_surface_c, _ = surface.subdivide() >>> sub_surface_b.base_x, sub_surface_b.base_y (0.5, 0.5) >>> sub_surface_b.width -0.5 >>> sub_surface_c.base_x, sub_surface_c.base_y (0.5, 0.0) >>> sub_surface_c.width 0.5
-
edges¶ tuple: The edges of the surface.
>>> nodes = np.array([ ... [0.0 , 0.0 ], ... [0.5 , -0.1875], ... [1.0 , 0.0 ], ... [0.1875, 0.5 ], ... [0.625 , 0.625 ], ... [0.0 , 1.0 ], ... ]) >>> surface = bezier.Surface(nodes) >>> edge1, _, _ = surface.edges >>> edge1 <Curve (degree=2, dimension=2)> >>> edge1.nodes array([[ 0. , 0. ], [ 0.5 , -0.1875], [ 1. , 0. ]])
Returns: The edges of the surface. Return type: Tuple[Curve,Curve,Curve]
-
evaluate_barycentric(lambda1, lambda2, lambda3)¶ Compute a point on the surface.
Evaluates \(B\left(\lambda_1, \lambda_2, \lambda_3\right)\).
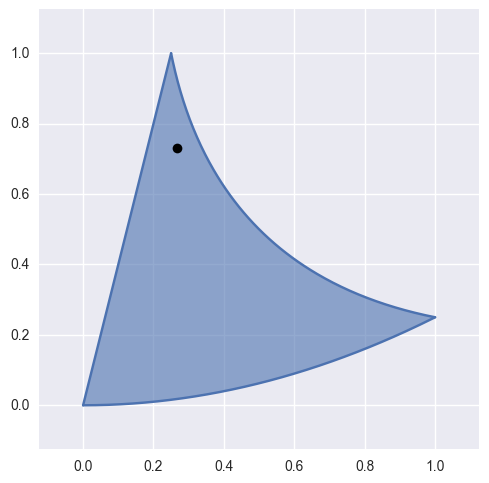
>>> nodes = np.array([ ... [0.0 , 0.0 ], ... [0.5 , 0.0 ], ... [1.0 , 0.25 ], ... [0.125, 0.5 ], ... [0.375, 0.375], ... [0.25 , 1.0 ], ... ]) >>> surface = bezier.Surface(nodes) >>> point = surface.evaluate_barycentric(0.125, 0.125, 0.75) >>> point array([ 0.265625 , 0.73046875])
However, this can’t be used for points outside the reference triangle:
>>> surface.evaluate_barycentric(-0.25, 0.75, 0.5) Traceback (most recent call last): ... ValueError: ('Parameters must be positive', -0.25, 0.75, 0.5)
or for non-Barycentric coordinates;
>>> surface.evaluate_barycentric(0.25, 0.25, 0.25) Traceback (most recent call last): ... ValueError: ('Values do not sum to 1', 0.25, 0.25, 0.25)
Parameters: Returns: The point on the surface (as a one dimensional NumPy array).
Return type: Raises: ValueError– If the weights are not valid barycentric coordinates, i.e. they don’t sum to1.ValueError– If some weights are negative.
-
evaluate_cartesian(s, t)¶ Compute a point on the surface.
Evaluates \(B\left(1 - s - t, s, t\right)\) by calling
evaluate_barycentric().Parameters: Returns: The point on the surface (as a one dimensional NumPy array).
Return type:
-
evaluate_multi(param_vals)¶ Compute multiple points on the surface.
If
param_valshas two columns, this method treats them as Cartesian: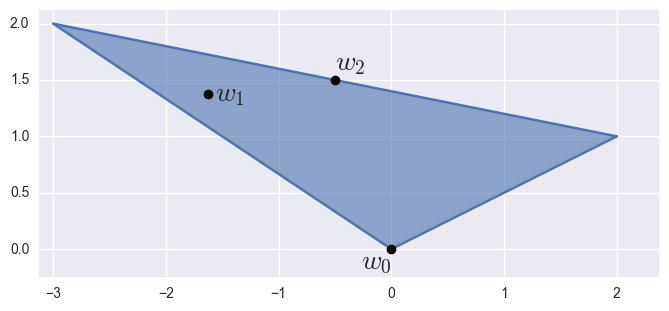
>>> nodes = np.array([ ... [ 0.0, 0.0], ... [ 2.0, 1.0], ... [-3.0, 2.0], ... ]) >>> surface = bezier.Surface(nodes) >>> surface <Surface (degree=1, dimension=2)> >>> param_vals = np.array([ ... [0.0 , 0.0 ], ... [0.125, 0.625], ... [0.5 , 0.5 ], ... ]) >>> points = surface.evaluate_multi(param_vals) >>> points array([[ 0. , 0. ], [-1.625, 1.375], [-0.5 , 1.5 ]])
and if
param_valshas three columns, treats them as Barycentric: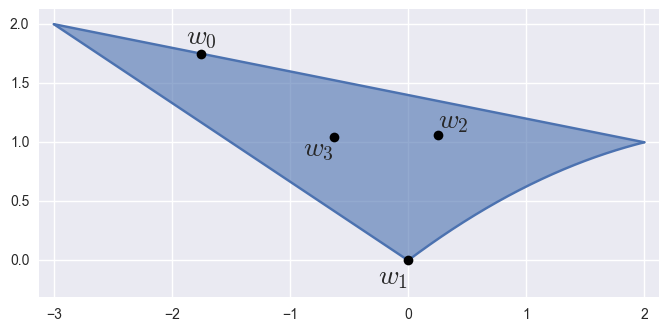
>>> nodes = np.array([ ... [ 0. , 0. ], ... [ 1. , 0.75], ... [ 2. , 1. ], ... [-1.5, 1. ], ... [-0.5, 1.5 ], ... [-3. , 2. ], ... ]) >>> surface = bezier.Surface(nodes) >>> surface <Surface (degree=2, dimension=2)> >>> param_vals = np.array([ ... [0. , 0.25, 0.75 ], ... [1. , 0. , 0. ], ... [0.25 , 0.5 , 0.25 ], ... [0.375, 0.25, 0.375], ... ]) >>> points = surface.evaluate_multi(param_vals) >>> points array([[-1.75 , 1.75 ], [ 0. , 0. ], [ 0.25 , 1.0625 ], [-0.625 , 1.046875]])
Note
This currently just uses
evaluate_cartesian()andevaluate_barycentric()so is less performant than it could be.Parameters: param_vals (numpy.ndarray) – Array of parameter values (as a 2D array).
Returns: The point on the surface.
Return type: Raises: ValueError– Ifparam_valsis not a 2D array.ValueError– Ifparam_valsdoesn’t have 2 or 3 columns.
-
plot(pts_per_edge, ax=None, with_nodes=False, show=False)¶ Plot the current surface.
Parameters: - pts_per_edge (int) – Number of points to plot per edge.
- ax (
Optional[matplotlib.artist.Artist]) – matplotlib axis object to add plot to. - with_nodes (
Optional[bool]) – Determines if the control points should be added to the plot. Off by default. - show (
Optional[bool]) – Flag indicating if the plot should be shown.
Returns: The axis containing the plot. This may be a newly created axis.
Return type: Raises: NotImplementedError– If the surface’s dimension is not2.
-
subdivide()¶ Split the surface into four sub-surfaces.
Does so by taking the unit triangle (i.e. the domain of the surface) and splitting it into four sub-triangles
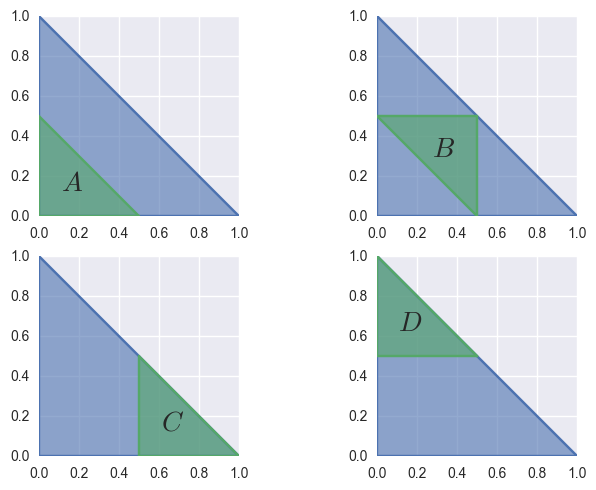
Then the surface is re-parameterized via the map to/from the given sub-triangles and the unit triangle.
For example, when a degree two surface is subdivided:
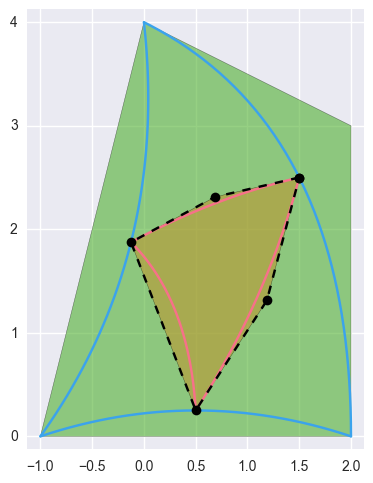
>>> nodes = np.array([ ... [-1.0 , 0.0 ], ... [ 0.5 , 0.5 ], ... [ 2.0 , 0.0 ], ... [ 0.25, 1.75], ... [ 2.0 , 3.0 ], ... [ 0.0 , 4.0 ], ... ]) >>> surface = bezier.Surface(nodes) >>> _, sub_surface_b, _, _ = surface.subdivide() >>> sub_surface_b <Surface (degree=2, dimension=2, base=(0.5, 0.5), width=-0.5)> >>> sub_surface_b.nodes array([[ 1.5 , 2.5 ], [ 0.6875, 2.3125], [-0.125 , 1.875 ], [ 1.1875, 1.3125], [ 0.4375, 1.3125], [ 0.5 , 0.25 ]])
Returns: The lower left, central, lower right and upper left sub-surfaces (in that order). Return type: Tuple[Surface,Surface,Surface,Surface]
-
is_valid¶ bool: Flag indicating if the surface is “valid”.
Here, “valid” means there are no self-intersections or singularities.
This checks if the Jacobian of the map from the reference triangle is nonzero. For example, a linear “surface” with collinear points is invalid:
>>> nodes = np.array([ ... [0.0, 0.0], ... [1.0, 1.0], ... [2.0, 2.0], ... ]) >>> surface = bezier.Surface(nodes) >>> surface.is_valid False
while a quadratic surface with one straight side:
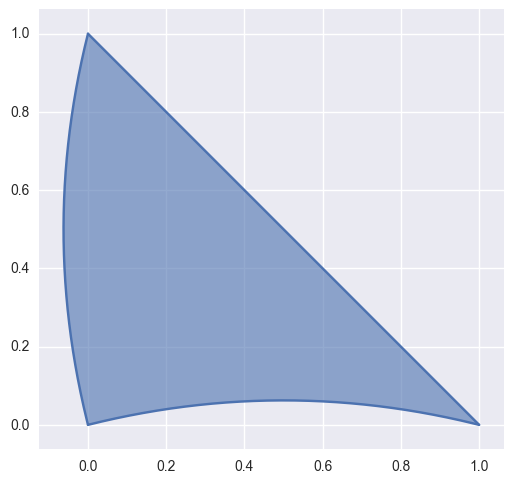
>>> nodes = np.array([ ... [ 0.0 , 0.0 ], ... [ 0.5 , 0.125], ... [ 1.0 , 0.0 ], ... [-0.125, 0.5 ], ... [ 0.5 , 0.5 ], ... [ 0.0 , 1.0 ], ... ]) >>> surface = bezier.Surface(nodes) >>> surface.is_valid True
though not all higher degree surfaces are valid:
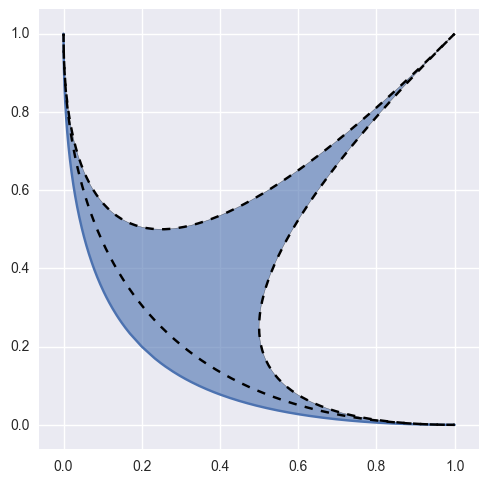
>>> nodes = np.array([ ... [1.0, 0.0], ... [0.0, 0.0], ... [1.0, 1.0], ... [0.0, 0.0], ... [0.0, 0.0], ... [0.0, 1.0], ... ]) >>> surface = bezier.Surface(nodes) >>> surface.is_valid False
-
locate(point)¶ Find a point on the current surface.
Solves for \(s\) and \(t\) in \(B(s, t) = p\).
Note
A unique solution is only guaranteed if the current surface is valid. This code assumes a valid surface, but doesn’t check.
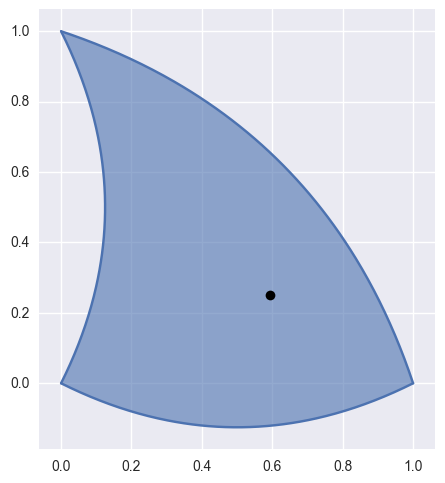
>>> surface = bezier.Surface(np.array([ ... [0.0 , 0.0 ], ... [0.5 , -0.25], ... [1.0 , 0.0 ], ... [0.25, 0.5 ], ... [0.75, 0.75], ... [0.0 , 1.0 ], ... ])) >>> point = np.array([[0.59375, 0.25]]) >>> s, t = surface.locate(point) >>> s 0.5 >>> t 0.25
Parameters: point (numpy.ndarray) – A (
1xD) point on the surface, where \(D\) is the dimension of the surface.Returns: The \(s\) and \(t\) values corresponding to
x_valandy_valorNoneif the point is not on thesurface.Return type: Raises: NotImplementedError– If the surface isn’t in \(\mathbf{R}^2\).ValueError– If the dimension of thepointdoesn’t match the dimension of the current surface.
-
intersect(other)¶ Find the common intersection with another surface.
Parameters: other (Surface) – Other surface to intersect with.
Returns: List of intersection objects (possibly empty).
Return type: Raises: TypeError– Ifotheris not a surface.NotImplementedError– If both surfaces aren’t two-dimensional.
-
__eq__(other)¶ Check equality against another shape.
Returns: Boolean indicating if the shapes are the same. Return type: bool
-
__ne__(other)¶ Check inequality against another shape.
Returns: Boolean indicating if the shapes are not the same. Return type: bool
-
copy()¶ Make a copy of the current shape.
Returns: Instance of the current shape.
-
degree¶ int: The degree of the current shape.
-
dimension¶ int: The dimension that the shape lives in.
For example, if the shape lives in \(\mathbf{R}^3\), then the dimension is
3.
-
nodes¶ numpy.ndarray: The nodes that define the current shape.