bezier.surface module¶
Helper for Bézier Surfaces / Triangles.
-
class
bezier.surface.Surface(nodes, degree, base_x=0.0, base_y=0.0, width=1.0, _copy=True)¶ Bases:
bezier._base.BaseRepresents a Bézier surface.
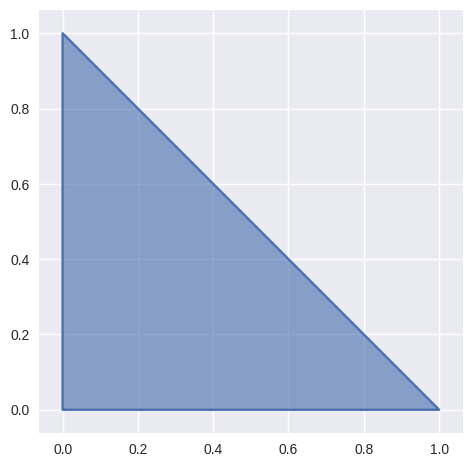
We define a Bézier triangle as a mapping from the unit simplex in 2D (i.e. the unit triangle) onto a surface in an arbitrary dimension. We use barycentric coordinates
\[\lambda_1 = 1 - s - t, \lambda_2 = s, \lambda_3 = t\]for points in the unit triangle \(\left\{(s, t) \mid 0 \leq s, t, s + t \leq 1\right\}\):
As with curves, using these weights we get convex combinations of points \(v_{i, j, k}\) in some vector space:
\[B\left(\lambda_1, \lambda_2, \lambda_3\right) = \sum_{i + j + k = d} \binom{d}{i \, j \, k} \lambda_1^i \lambda_2^j \lambda_3^k \cdot v_{i, j, k}\]Note
We assume the nodes are ordered from left-to-right and from bottom-to-top. So for example, the linear triangle:
(0,0,1) (1,0,0) (0,1,0)
is ordered as
\[\left[\begin{array}{c c c} v_{1,0,0} & v_{0,1,0} & v_{0,0,1} \end{array}\right]^T\]the quadratic triangle:
(0,0,2) (1,0,1) (0,1,1) (2,0,0) (1,1,0) (0,2,0)
is ordered as
\[\left[\begin{array}{c c c c c c} v_{2,0,0} & v_{1,1,0} & v_{0,2,0} & v_{1,0,1} & v_{0,1,1} & v_{0,0,2} \end{array}\right]^T\]the cubic triangle:
(0,0,3) (1,0,2) (0,1,2) (2,0,1) (1,1,1) (0,2,1) (3,0,0) (2,1,0) (1,2,0) (0,3,0)
is ordered as
\[\left[\begin{array}{c c c c c c c c c c} v_{3,0,0} & v_{2,1,0} & v_{1,2,0} & v_{0,3,0} & v_{2,0,1} & v_{1,1,1} & v_{0,2,1} & v_{1,0,2} & v_{0,1,2} & v_{0,0,3} \end{array}\right]^T\]and so on.
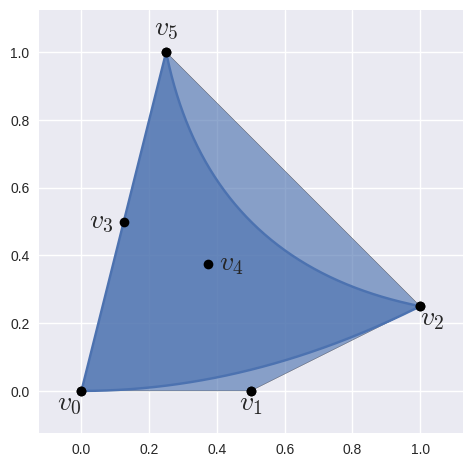
>>> import bezier >>> nodes = np.asfortranarray([ ... [0.0 , 0.0 ], ... [0.5 , 0.0 ], ... [1.0 , 0.25 ], ... [0.125, 0.5 ], ... [0.375, 0.375], ... [0.25 , 1.0 ], ... ]) >>> surface = bezier.Surface(nodes, degree=2) >>> surface <Surface (degree=2, dimension=2)>
Parameters: - nodes (numpy.ndarray) – The nodes in the surface. The rows represent each node while the columns are the dimension of the ambient space.
- degree (int) – The degree of the surface. This is assumed to
correctly correspond to the number of
nodes. Usefrom_nodes()if the degree has not yet been computed. - base_x (
Optional[float]) – The \(x\)-coordinate of the base vertex of the sub-triangle that this surface represents. Seewidth()for more info. - base_y (
Optional[float]) – The \(y\)-coordinate of the base vertex of the sub-triangle that this surface represents. Seewidth()for more info. - width (
Optional[float]) – The width of the sub-triangle that this surface represents. Seewidth()for more info. - _copy (bool) – Flag indicating if the nodes should be copied before
being stored. Defaults to
Truesince callers may freely mutatenodesafter passing in.
-
area¶ float – The area of the current surface.
Raises: NotImplementedError– If the area isn’t already cached.
-
degree¶ int – The degree of the current shape.
-
dimension¶ int – The dimension that the shape lives in.
For example, if the shape lives in \(\mathbf{R}^3\), then the dimension is
3.
-
edges¶ The edges of the surface.
>>> nodes = np.asfortranarray([ ... [0.0 , 0.0 ], ... [0.5 , -0.1875], ... [1.0 , 0.0 ], ... [0.1875, 0.5 ], ... [0.625 , 0.625 ], ... [0.0 , 1.0 ], ... ]) >>> surface = bezier.Surface(nodes, degree=2) >>> edge1, _, _ = surface.edges >>> edge1 <Curve (degree=2, dimension=2)> >>> edge1.nodes array([[ 0. , 0. ], [ 0.5 , -0.1875], [ 1. , 0. ]])
Returns: The edges of the surface. Return type: Tuple[Curve,Curve,Curve]
-
elevate()¶ Return a degree-elevated version of the current surface.
Does this by converting the current nodes \(\left\{v_{i, j, k}\right\}_{i + j + k = d}\) to new nodes \(\left\{w_{i, j, k}\right\}_{i + j + k = d + 1}\). Does so by re-writing
\[E\left(\lambda_1, \lambda_2, \lambda_3\right) = \left(\lambda_1 + \lambda_2 + \lambda_3\right) B\left(\lambda_1, \lambda_2, \lambda_3\right) = \sum_{i + j + k = d + 1} \binom{d + 1}{i \, j \, k} \lambda_1^i \lambda_2^j \lambda_3^k \cdot w_{i, j, k}\]In this form, we must have
\[\begin{split}\begin{align*} \binom{d + 1}{i \, j \, k} \cdot w_{i, j, k} &= \binom{d}{i - 1 \, j \, k} \cdot v_{i - 1, j, k} + \binom{d}{i \, j - 1 \, k} \cdot v_{i, j - 1, k} + \binom{d}{i \, j \, k - 1} \cdot v_{i, j, k - 1} \\ \Longleftrightarrow (d + 1) \cdot w_{i, j, k} &= i \cdot v_{i - 1, j, k} + j \cdot v_{i, j - 1, k} + k \cdot v_{i, j, k - 1} \end{align*}\end{split}\]where we define, for example, \(v_{i, j, k - 1} = 0\) if \(k = 0\).
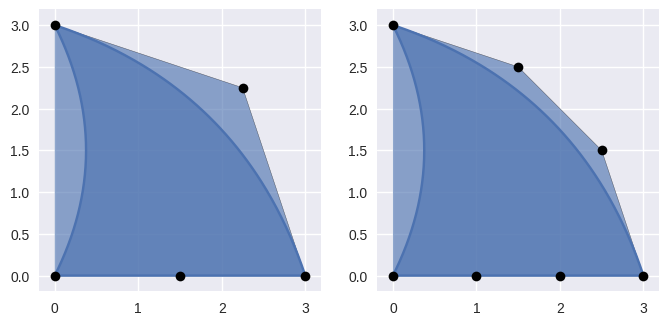
>>> nodes = np.asfortranarray([ ... [0.0 , 0.0 ], ... [1.5 , 0.0 ], ... [3.0 , 0.0 ], ... [0.75, 1.5 ], ... [2.25, 2.25], ... [0.0 , 3.0 ], ... ]) >>> surface = bezier.Surface(nodes, degree=2) >>> elevated = surface.elevate() >>> elevated <Surface (degree=3, dimension=2)> >>> elevated.nodes array([[ 0. , 0. ], [ 1. , 0. ], [ 2. , 0. ], [ 3. , 0. ], [ 0.5 , 1. ], [ 1.5 , 1.25], [ 2.5 , 1.5 ], [ 0.5 , 2. ], [ 1.5 , 2.5 ], [ 0. , 3. ]])
Returns: The degree-elevated surface. Return type: Surface
-
evaluate_barycentric(lambda1, lambda2, lambda3, _verify=True)¶ Compute a point on the surface.
Evaluates \(B\left(\lambda_1, \lambda_2, \lambda_3\right)\).
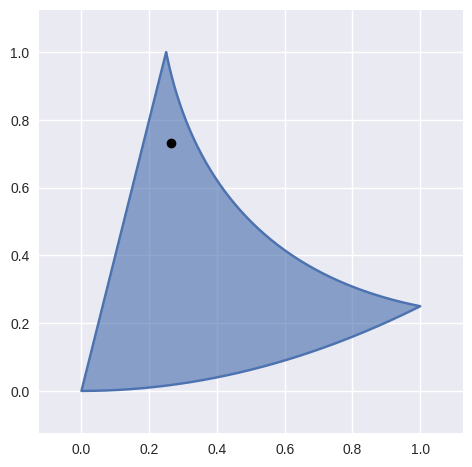
>>> nodes = np.asfortranarray([ ... [0.0 , 0.0 ], ... [0.5 , 0.0 ], ... [1.0 , 0.25 ], ... [0.125, 0.5 ], ... [0.375, 0.375], ... [0.25 , 1.0 ], ... ]) >>> surface = bezier.Surface(nodes, degree=2) >>> point = surface.evaluate_barycentric(0.125, 0.125, 0.75) >>> point array([[ 0.265625 , 0.73046875]])
However, this can’t be used for points outside the reference triangle:
>>> surface.evaluate_barycentric(-0.25, 0.75, 0.5) Traceback (most recent call last): ... ValueError: ('Parameters must be positive', -0.25, 0.75, 0.5)
or for non-Barycentric coordinates;
>>> surface.evaluate_barycentric(0.25, 0.25, 0.25) Traceback (most recent call last): ... ValueError: ('Values do not sum to 1', 0.25, 0.25, 0.25)
However, these “invalid” inputs can be used if
_verifyisFalse.>>> surface.evaluate_barycentric(-0.25, 0.75, 0.5, _verify=False) array([[ 0.6875 , 0.546875]]) >>> surface.evaluate_barycentric(0.25, 0.25, 0.25, _verify=False) array([[ 0.203125, 0.1875 ]])
Parameters: - lambda1 (float) – Parameter along the reference triangle.
- lambda2 (float) – Parameter along the reference triangle.
- lambda3 (float) – Parameter along the reference triangle.
- _verify (
Optional[bool]) – Indicates if the barycentric coordinates should be verified as summing to one and all non-negative (i.e. verified as barycentric). Can either be used to evaluate at points outside the domain, or to save time when the caller already knows the input is verified. Defaults toTrue.
Returns: The point on the surface (as a two dimensional NumPy array with a single row).
Return type: Raises: ValueError– If the weights are not valid barycentric coordinates, i.e. they don’t sum to1. (Won’t raise if_verify=False.)ValueError– If some weights are negative. (Won’t raise if_verify=False.)
-
evaluate_barycentric_multi(param_vals, _verify=True)¶ Compute multiple points on the surface.
Assumes
param_valshas three columns of Barycentric coordinates. Seeevaluate_barycentric()for more details on how each row of parameter values is evaluated.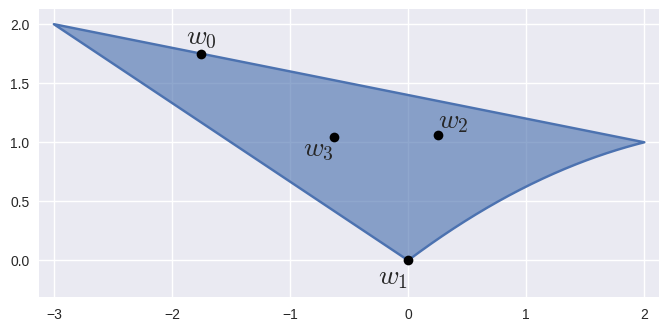
>>> nodes = np.asfortranarray([ ... [ 0. , 0. ], ... [ 1. , 0.75], ... [ 2. , 1. ], ... [-1.5, 1. ], ... [-0.5, 1.5 ], ... [-3. , 2. ], ... ]) >>> surface = bezier.Surface(nodes, degree=2) >>> surface <Surface (degree=2, dimension=2)> >>> param_vals = np.asfortranarray([ ... [0. , 0.25, 0.75 ], ... [1. , 0. , 0. ], ... [0.25 , 0.5 , 0.25 ], ... [0.375, 0.25, 0.375], ... ]) >>> points = surface.evaluate_barycentric_multi(param_vals) >>> points array([[-1.75 , 1.75 ], [ 0. , 0. ], [ 0.25 , 1.0625 ], [-0.625 , 1.046875]])
Note
There is also a Fortran implementation of this function, which will be used if it can be built.
Parameters: - param_vals (numpy.ndarray) – Array of parameter values (as a
Nx3array). - _verify (
Optional[bool]) – Indicates if the coordinates should be verified. Seeevaluate_barycentric(). Defaults toTrue. Will also double check thatparam_valsis the right shape.
Returns: The points on the surface.
Return type: Raises: ValueError– Ifparam_valsis not a 2D array and_verify=True.- param_vals (numpy.ndarray) – Array of parameter values (as a
-
evaluate_cartesian(s, t, _verify=True)¶ Compute a point on the surface.
Evaluates \(B\left(1 - s - t, s, t\right)\) by calling
evaluate_barycentric():>>> nodes = np.asfortranarray([ ... [0.0 , 0.0 ], ... [0.5 , 0.5 ], ... [1.0 , 0.625], ... [0.0 , 0.5 ], ... [0.5 , 0.5 ], ... [0.25, 1.0 ], ... ]) >>> surface = bezier.Surface(nodes, degree=2) >>> point = surface.evaluate_cartesian(0.125, 0.375) >>> point array([[ 0.16015625, 0.44726562]]) >>> surface.evaluate_barycentric(0.5, 0.125, 0.375) array([[ 0.16015625, 0.44726562]])
Parameters: Returns: The point on the surface (as a two dimensional NumPy array).
Return type:
-
evaluate_cartesian_multi(param_vals, _verify=True)¶ Compute multiple points on the surface.
Assumes
param_valshas two columns of Cartesian coordinates. Seeevaluate_cartesian()for more details on how each row of parameter values is evaluated.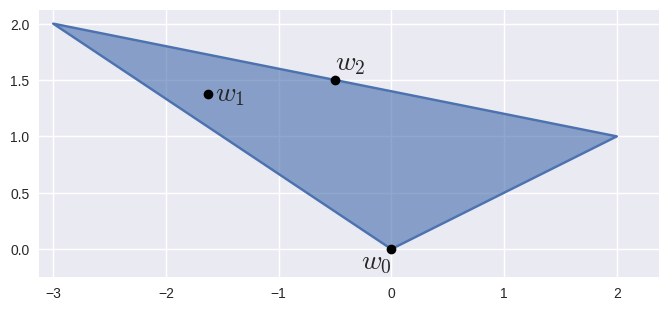
>>> nodes = np.asfortranarray([ ... [ 0.0, 0.0], ... [ 2.0, 1.0], ... [-3.0, 2.0], ... ]) >>> surface = bezier.Surface(nodes, degree=1) >>> surface <Surface (degree=1, dimension=2)> >>> param_vals = np.asfortranarray([ ... [0.0 , 0.0 ], ... [0.125, 0.625], ... [0.5 , 0.5 ], ... ]) >>> points = surface.evaluate_cartesian_multi(param_vals) >>> points array([[ 0. , 0. ], [-1.625, 1.375], [-0.5 , 1.5 ]])
Note
There is also a Fortran implementation of this function, which will be used if it can be built.
Parameters: - param_vals (numpy.ndarray) – Array of parameter values (as a
Nx2array). - _verify (
Optional[bool]) – Indicates if the coordinates should be verified. Seeevaluate_cartesian(). Defaults toTrue. Will also double check thatparam_valsis the right shape.
Returns: The points on the surface.
Return type: Raises: ValueError– Ifparam_valsis not a 2D array and_verify=True.- param_vals (numpy.ndarray) – Array of parameter values (as a
-
classmethod
from_nodes(nodes, base_x=0.0, base_y=0.0, width=1.0, _copy=True)¶ Create a
Surfacefrom nodes.Computes the
degreebased on the shape ofnodes.Parameters: - nodes (numpy.ndarray) – The nodes in the surface. The rows represent each node while the columns are the dimension of the ambient space.
- base_x (
Optional[float]) – The \(x\)-coordinate of the base vertex of the sub-triangle that this surface represents. - base_y (
Optional[float]) – The \(y\)-coordinate of the base vertex of the sub-triangle that this surface represents. - width (
Optional[float]) – The width of the sub-triangle that this surface represents. - _copy (bool) – Flag indicating if the nodes should be copied before
being stored. Defaults to
Truesince callers may freely mutatenodesafter passing in.
Returns: The constructed surface.
Return type:
-
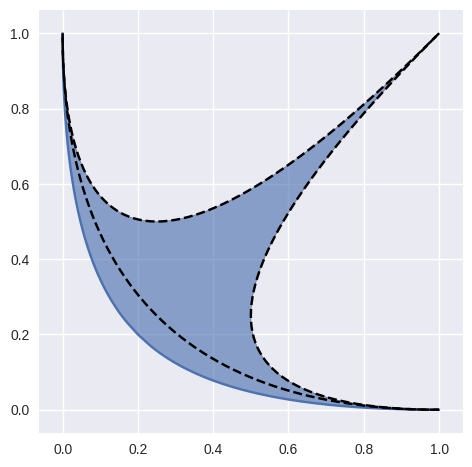
intersect(other, strategy=<IntersectionStrategy.geometric: 'geometric'>, _verify=True)¶ Find the common intersection with another surface.
Parameters: - other (Surface) – Other surface to intersect with.
- strategy (
Optional[IntersectionStrategy]) – The intersection algorithm to use. Defaults to geometric. - _verify (
Optional[bool]) – Indicates if extra caution should be used to verify assumptions about the algorithm as it proceeds. Can be disabled to speed up execution time. Defaults toTrue.
Returns: List of intersections (possibly empty).
Return type: List[CurvedPolygon]Raises: TypeError– Ifotheris not a surface.NotImplementedError– If at least one of the surfaces isn’t two-dimensional.
-
is_valid¶ bool – Flag indicating if the surface is “valid”.
Here, “valid” means there are no self-intersections or singularities.
This checks if the Jacobian of the map from the reference triangle is nonzero. For example, a linear “surface” with collinear points is invalid:
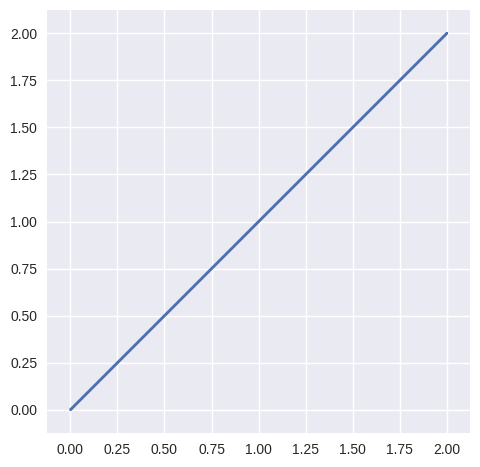
>>> nodes = np.asfortranarray([ ... [0.0, 0.0], ... [1.0, 1.0], ... [2.0, 2.0], ... ]) >>> surface = bezier.Surface(nodes, degree=1) >>> surface.is_valid False
while a quadratic surface with one straight side:
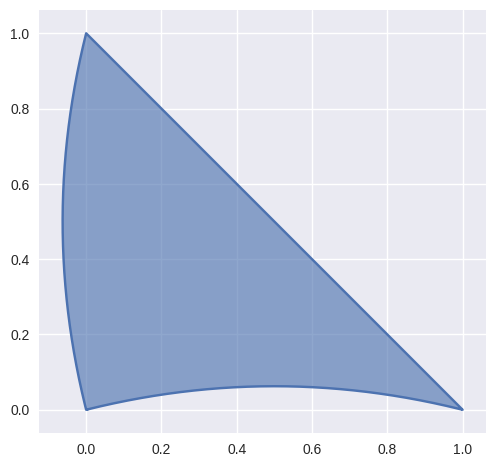
>>> nodes = np.asfortranarray([ ... [ 0.0 , 0.0 ], ... [ 0.5 , 0.125], ... [ 1.0 , 0.0 ], ... [-0.125, 0.5 ], ... [ 0.5 , 0.5 ], ... [ 0.0 , 1.0 ], ... ]) >>> surface = bezier.Surface(nodes, degree=2) >>> surface.is_valid True
though not all higher degree surfaces are valid:
>>> nodes = np.asfortranarray([ ... [1.0, 0.0], ... [0.0, 0.0], ... [1.0, 1.0], ... [0.0, 0.0], ... [0.0, 0.0], ... [0.0, 1.0], ... ]) >>> surface = bezier.Surface(nodes, degree=2) >>> surface.is_valid False
-
locate(point, _verify=True)¶ Find a point on the current surface.
Solves for \(s\) and \(t\) in \(B(s, t) = p\).
Note
A unique solution is only guaranteed if the current surface is valid. This code assumes a valid surface, but doesn’t check.
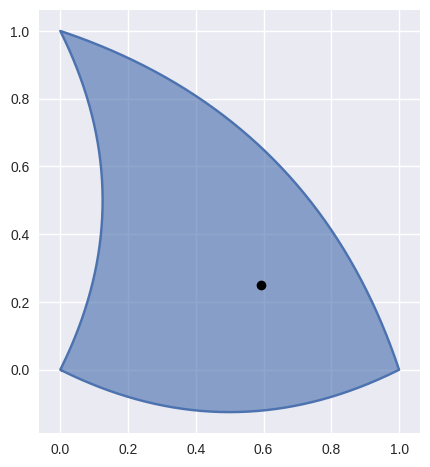
>>> nodes = np.asfortranarray([ ... [0.0 , 0.0 ], ... [0.5 , -0.25], ... [1.0 , 0.0 ], ... [0.25, 0.5 ], ... [0.75, 0.75], ... [0.0 , 1.0 ], ... ]) >>> surface = bezier.Surface(nodes, degree=2) >>> point = np.asfortranarray([[0.59375, 0.25]]) >>> s, t = surface.locate(point) >>> s 0.5 >>> t 0.25
Parameters: - point (numpy.ndarray) – A (
1xD) point on the surface, where \(D\) is the dimension of the surface. - _verify (
Optional[bool]) – Indicates if extra caution should be used to verify assumptions about the inputs. Can be disabled to speed up execution time. Defaults toTrue.
Returns: The \(s\) and \(t\) values corresponding to
pointorNoneif the point is not on the surface.Return type: Raises: NotImplementedError– If the surface isn’t in \(\mathbf{R}^2\).ValueError– If the dimension of thepointdoesn’t match the dimension of the current surface.
- point (numpy.ndarray) – A (
-
nodes¶ numpy.ndarray – The nodes that define the current shape.
-
plot(pts_per_edge, color=None, ax=None, with_nodes=False)¶ Plot the current surface.
Parameters: - pts_per_edge (int) – Number of points to plot per edge.
- color (
Optional[Tuple[float,float,float] ]) – Color as RGB profile. - ax (
Optional[matplotlib.artist.Artist]) – matplotlib axis object to add plot to. - with_nodes (
Optional[bool]) – Determines if the control points should be added to the plot. Off by default.
Returns: The axis containing the plot. This may be a newly created axis.
Return type: Raises: NotImplementedError– If the surface’s dimension is not2.
-
subdivide()¶ Split the surface into four sub-surfaces.
Does so by taking the unit triangle (i.e. the domain of the surface) and splitting it into four sub-triangles
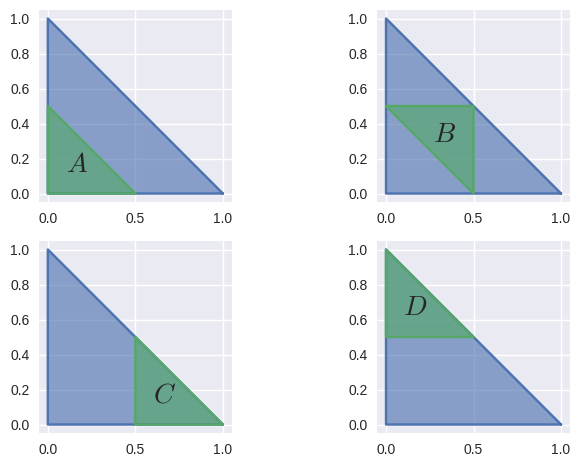
Then the surface is re-parameterized via the map to/from the given sub-triangles and the unit triangle.
For example, when a degree two surface is subdivided:
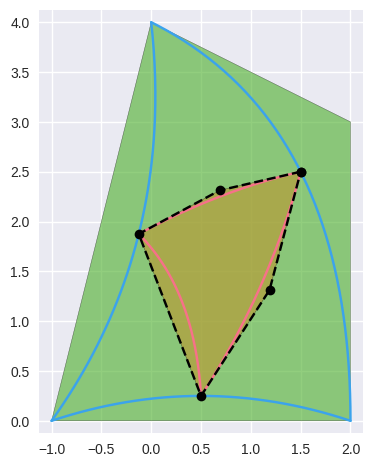
>>> nodes = np.asfortranarray([ ... [-1.0 , 0.0 ], ... [ 0.5 , 0.5 ], ... [ 2.0 , 0.0 ], ... [ 0.25, 1.75], ... [ 2.0 , 3.0 ], ... [ 0.0 , 4.0 ], ... ]) >>> surface = bezier.Surface(nodes, degree=2) >>> _, sub_surface_b, _, _ = surface.subdivide() >>> sub_surface_b <Surface (degree=2, dimension=2, base=(0.5, 0.5), width=-0.5)> >>> sub_surface_b.nodes array([[ 1.5 , 2.5 ], [ 0.6875, 2.3125], [-0.125 , 1.875 ], [ 1.1875, 1.3125], [ 0.4375, 1.3125], [ 0.5 , 0.25 ]])
Returns: The lower left, central, lower right and upper left sub-surfaces (in that order). Return type: Tuple[Surface,Surface,Surface,Surface]
-
width¶ float – The “width” of the parameterized triangle.
When re-parameterizing (e.g. via
subdivide()) we specialize the surface from the unit triangle to some sub-triangle. After doing this, we re-parameterize so that that sub-triangle is treated like the unit triangle.To track which sub-triangle we are in during the subdivision process, we use the coordinates of the base vertex as well as the “width” of each leg.
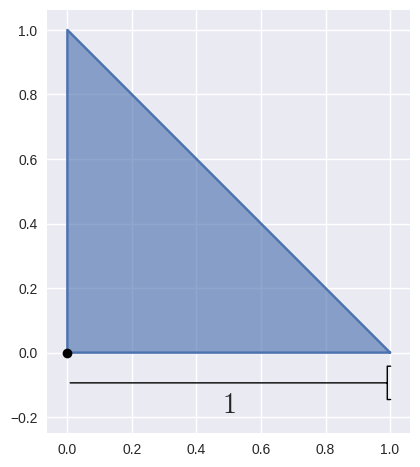
>>> surface.base_x, surface.base_y (0.0, 0.0) >>> surface.width 1.0
Upon subdivision, the width halves (and potentially changes sign) and the vertex moves to one of four points:
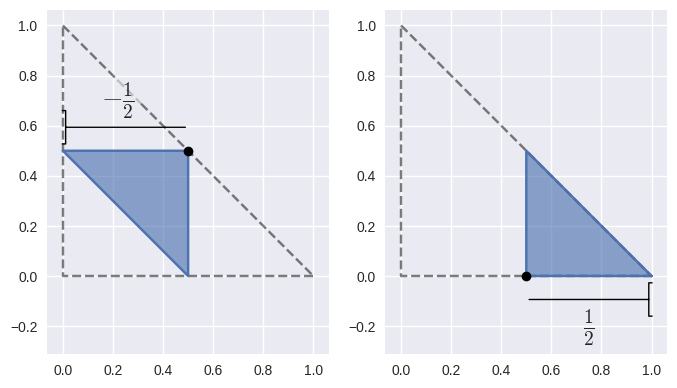
>>> _, sub_surface_b, sub_surface_c, _ = surface.subdivide() >>> sub_surface_b.base_x, sub_surface_b.base_y (0.5, 0.5) >>> sub_surface_b.width -0.5 >>> sub_surface_c.base_x, sub_surface_c.base_y (0.5, 0.0) >>> sub_surface_c.width 0.5