bezier.curve module
Helper for Bézier Curves.
See Curve-Curve Intersection for examples using the
Curve class to find intersections.
- class bezier.curve.Curve(nodes, degree, *, copy=True, verify=True)
Bases:
BaseRepresents a Bézier curve.
We take the traditional definition: a Bézier curve is a mapping from \(s \in \left[0, 1\right]\) to convex combinations of points \(v_0, v_1, \ldots, v_n\) in some vector space:
\[B(s) = \sum_{j = 0}^n \binom{n}{j} s^j (1 - s)^{n - j} \cdot v_j\]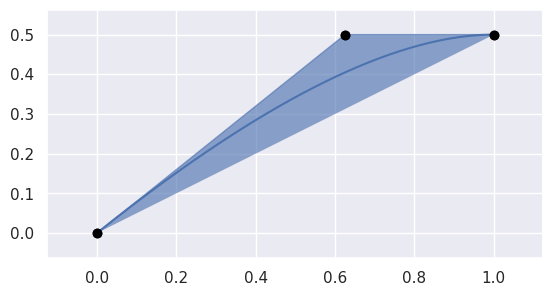
>>> import bezier >>> import numpy as np >>> nodes = np.asfortranarray([ ... [0.0, 0.625, 1.0], ... [0.0, 0.5 , 0.5], ... ]) >>> curve = bezier.Curve(nodes, degree=2) >>> curve <Curve (degree=2, dimension=2)>
- Parameters:
nodes (
SequenceSequencenumbers.Number) – The nodes in the curve. Must be convertible to a 2D NumPy array of floating point values, where the columns represent each node while the rows are the dimension of the ambient space.degree (int) – The degree of the curve. This is assumed to correctly correspond to the number of
nodes. Usefrom_nodes()if the degree has not yet been computed.copy (bool) – Flag indicating if the nodes should be copied before being stored. Defaults to
Truesince callers may freely mutatenodesafter passing in.verify (bool) – Flag indicating if the degree should be verified against the number of nodes. Defaults to
True.
- classmethod from_nodes(nodes, copy=True)
Create a
Curvefrom nodes.Computes the
degreebased on the shape ofnodes.- Parameters:
nodes (
SequenceSequencenumbers.Number) – The nodes in the curve. Must be convertible to a 2D NumPy array of floating point values, where the columns represent each node while the rows are the dimension of the ambient space.copy (bool) – Flag indicating if the nodes should be copied before being stored. Defaults to
Truesince callers may freely mutatenodesafter passing in.
- Returns:
The constructed curve.
- Return type:
- property length
The length of the current curve.
Computes the length via:
\[\int_{B\left(\left[0, 1\right]\right)} 1 \, d\mathbf{x} = \int_0^1 \left\lVert B'(s) \right\rVert_2 \, ds\]- Returns:
The length of the current curve.
- Return type:
- evaluate(s)
Evaluate \(B(s)\) along the curve.
This method acts as a (partial) inverse to
locate().See
evaluate_multi()for more details.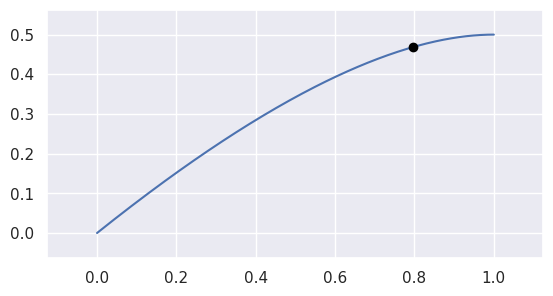
>>> nodes = np.asfortranarray([ ... [0.0, 0.625, 1.0], ... [0.0, 0.5 , 0.5], ... ]) >>> curve = bezier.Curve(nodes, degree=2) >>> curve.evaluate(0.75) array([[0.796875], [0.46875 ]])
- Parameters:
s (float) – Parameter along the curve.
- Returns:
The point on the curve (as a two dimensional NumPy array with a single column).
- Return type:
- evaluate_multi(s_vals)
Evaluate \(B(s)\) for multiple points along the curve.
This is done via a modified Horner’s method (vectorized for each
s-value).>>> nodes = np.asfortranarray([ ... [0.0, 1.0], ... [0.0, 2.0], ... [0.0, 3.0], ... ]) >>> curve = bezier.Curve(nodes, degree=1) >>> curve <Curve (degree=1, dimension=3)> >>> s_vals = np.linspace(0.0, 1.0, 5) >>> curve.evaluate_multi(s_vals) array([[0. , 0.25, 0.5 , 0.75, 1. ], [0. , 0.5 , 1. , 1.5 , 2. ], [0. , 0.75, 1.5 , 2.25, 3. ]])
- Parameters:
s_vals (numpy.ndarray) – Parameters along the curve (as a 1D array).
- Returns:
The points on the curve. As a two dimensional NumPy array, with the columns corresponding to each
svalue and the rows to the dimension.- Return type:
- evaluate_hodograph(s)
Evaluate the tangent vector \(B'(s)\) along the curve.
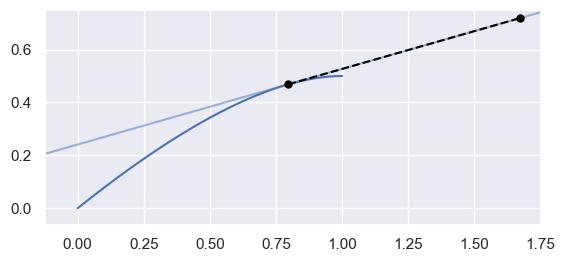
>>> nodes = np.asfortranarray([ ... [0.0, 0.625, 1.0], ... [0.0, 0.5 , 0.5], ... ]) >>> curve = bezier.Curve(nodes, degree=2) >>> curve.evaluate_hodograph(0.75) array([[0.875], [0.25 ]])
- Parameters:
s (float) – Parameter along the curve.
- Returns:
The tangent vector along the curve (as a two dimensional NumPy array with a single column).
- Return type:
- plot(num_pts, color=None, alpha=None, ax=None)
Plot the current curve.
- Parameters:
- Returns:
The axis containing the plot. This may be a newly created axis.
- Return type:
- Raises:
NotImplementedError – If the curve’s dimension is not
2.
- subdivide()
Split the curve \(B(s)\) into a left and right half.
Takes the interval \(\left[0, 1\right]\) and splits the curve into \(B_1 = B\left(\left[0, \frac{1}{2}\right]\right)\) and \(B_2 = B\left(\left[\frac{1}{2}, 1\right]\right)\). In order to do this, also reparameterizes the curve, hence the resulting left and right halves have new nodes.

>>> nodes = np.asfortranarray([ ... [0.0, 1.25, 2.0], ... [0.0, 3.0 , 1.0], ... ]) >>> curve = bezier.Curve(nodes, degree=2) >>> left, right = curve.subdivide() >>> left.nodes array([[0. , 0.625, 1.125], [0. , 1.5 , 1.75 ]]) >>> right.nodes array([[1.125, 1.625, 2. ], [1.75 , 2. , 1. ]])
- intersect(other, strategy=IntersectionStrategy.GEOMETRIC, verify=True)
Find the points of intersection with another curve.
See Curve-Curve Intersection for more details.
>>> nodes1 = np.asfortranarray([ ... [0.0, 0.375, 0.75 ], ... [0.0, 0.75 , 0.375], ... ]) >>> curve1 = bezier.Curve(nodes1, degree=2) >>> nodes2 = np.asfortranarray([ ... [0.5, 0.5 ], ... [0.0, 0.75], ... ]) >>> curve2 = bezier.Curve(nodes2, degree=1) >>> intersections = curve1.intersect(curve2) >>> 3.0 * intersections array([[2.], [2.]]) >>> s_vals = intersections[0, :] >>> curve1.evaluate_multi(s_vals) array([[0.5], [0.5]])
- Parameters:
other (Curve) – Other curve to intersect with.
strategy (
OptionalIntersectionStrategy) – The intersection algorithm to use. Defaults to geometric.verify (
Optionalbool) – Indicates if extra caution should be used to verify assumptions about the input and current curve. Can be disabled to speed up execution time. Defaults toTrue.
- Returns:
2 x Narray ofs- andt-parameters where intersections occur (possibly empty).- Return type:
- Raises:
TypeError – If
otheris not a curve (andverify=True).NotImplementedError – If at least one of the curves isn’t two-dimensional (and
verify=True).ValueError – If
strategyis not a validIntersectionStrategy.
- self_intersections(strategy=IntersectionStrategy.GEOMETRIC, verify=True)
Find the points where the curve intersects itself.
For curves in general position, there will be no self-intersections:
>>> nodes = np.asfortranarray([ ... [0.0, 1.0, 0.0], ... [0.0, 1.0, 2.0], ... ]) >>> curve = bezier.Curve(nodes, degree=2) >>> curve.self_intersections() array([], shape=(2, 0), dtype=float64)
However, some curves do have self-intersections. Consider a cubic with
\[B\left(\frac{3 - \sqrt{5}}{6}\right) = B\left(\frac{3 + \sqrt{5}}{6}\right)\]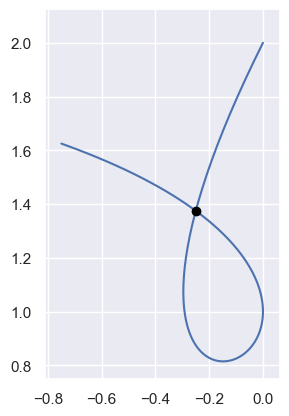
>>> nodes = np.asfortranarray([ ... [0.0, -1.0, 1.0, -0.75 ], ... [2.0, 0.0, 1.0, 1.625], ... ]) >>> curve = bezier.Curve(nodes, degree=3) >>> self_intersections = curve.self_intersections() >>> sq5 = np.sqrt(5.0) >>> expected = np.asfortranarray([ ... [3 - sq5], ... [3 + sq5], ... ]) / 6.0 >>> max_err = np.max(np.abs(self_intersections - expected)) >>> binary_exponent(max_err) -53
Some (somewhat pathological) curves can have multiple self-intersections, though the number possible is largely constrained by the degree. For example, this degree six curve has two self-intersections:
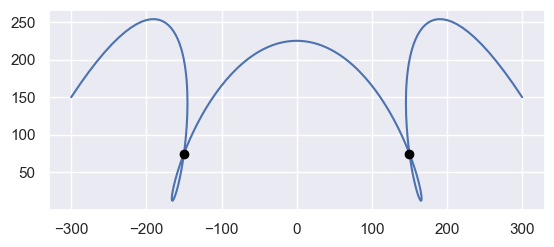
>>> nodes = np.asfortranarray([ ... [-300.0, 227.5 , -730.0, 0.0 , 730.0, -227.5 , 300.0], ... [ 150.0, 953.75, -2848.0, 4404.75, -2848.0, 953.75, 150.0], ... ]) >>> curve = bezier.Curve(nodes, degree=6) >>> self_intersections = curve.self_intersections() >>> 6.0 * self_intersections array([[1., 4.], [2., 5.]]) >>> curve.evaluate_multi(self_intersections[:, 0]) array([[-150., -150.], [ 75., 75.]]) >>> curve.evaluate_multi(self_intersections[:, 1]) array([[150., 150.], [ 75., 75.]])
- Parameters:
strategy (
OptionalIntersectionStrategy) – The intersection algorithm to use. Defaults to geometric.verify (
Optionalbool) – Indicates if extra caution should be used to verify assumptions about the current curve. Can be disabled to speed up execution time. Defaults toTrue.
- Returns:
2 x Narray ofs1- ands2-parameters where self-intersections occur (possibly empty). For each pair we have \(s_1 \neq s_2\) and \(B(s_1) = B(s_2)\).- Return type:
- Raises:
NotImplementedError – If the curve isn’t two-dimensional (and
verify=True).NotImplementedError – If
strategyis notGEOMETRIC.
- elevate()
Return a degree-elevated version of the current curve.
Does this by converting the current nodes \(v_0, \ldots, v_n\) to new nodes \(w_0, \ldots, w_{n + 1}\) where
\[\begin{split}\begin{align*} w_0 &= v_0 \\ w_j &= \frac{j}{n + 1} v_{j - 1} + \frac{n + 1 - j}{n + 1} v_j \\ w_{n + 1} &= v_n \end{align*}\end{split}\]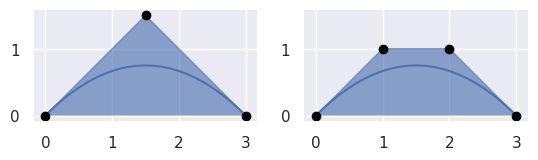
>>> nodes = np.asfortranarray([ ... [0.0, 1.5, 3.0], ... [0.0, 1.5, 0.0], ... ]) >>> curve = bezier.Curve(nodes, degree=2) >>> elevated = curve.elevate() >>> elevated <Curve (degree=3, dimension=2)> >>> elevated.nodes array([[0., 1., 2., 3.], [0., 1., 1., 0.]])
- Returns:
The degree-elevated curve.
- Return type:
- reduce_()
Return a degree-reduced version of the current curve.
Does this by converting the current nodes \(v_0, \ldots, v_n\) to new nodes \(w_0, \ldots, w_{n - 1}\) that correspond to reversing the
elevate()process.This uses the pseudo-inverse of the elevation matrix. For example when elevating from degree 2 to 3, the matrix \(E_2\) is given by
\[\begin{split}\mathbf{v} = \left[\begin{array}{c c c} v_0 & v_1 & v_2 \end{array}\right] \longmapsto \left[\begin{array}{c c c c} v_0 & \frac{v_0 + 2 v_1}{3} & \frac{2 v_1 + v_2}{3} & v_2 \end{array}\right] = \frac{1}{3} \mathbf{v} \left[\begin{array}{c c c c} 3 & 1 & 0 & 0 \\ 0 & 2 & 2 & 0 \\ 0 & 0 & 1 & 3 \end{array}\right]\end{split}\]and the (right) pseudo-inverse is given by
\[\begin{split}R_2 = E_2^T \left(E_2 E_2^T\right)^{-1} = \frac{1}{20} \left[\begin{array}{c c c} 19 & -5 & 1 \\ 3 & 15 & -3 \\ -3 & 15 & 3 \\ 1 & -5 & 19 \end{array}\right].\end{split}\]Warning
Though degree-elevation preserves the start and end nodes, degree reduction has no such guarantee. Rather, the nodes produced are “best” in the least squares sense (when solving the normal equations).
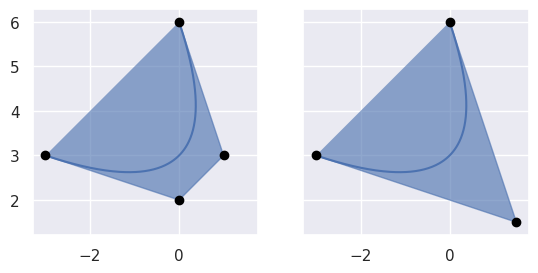
>>> nodes = np.asfortranarray([ ... [-3.0, 0.0, 1.0, 0.0], ... [ 3.0, 2.0, 3.0, 6.0], ... ]) >>> curve = bezier.Curve(nodes, degree=3) >>> reduced = curve.reduce_() >>> reduced <Curve (degree=2, dimension=2)> >>> reduced.nodes array([[-3. , 1.5, 0. ], [ 3. , 1.5, 6. ]])
In the case that the current curve is not degree-elevated.
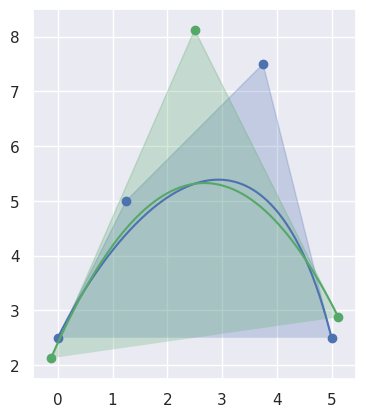
>>> nodes = np.asfortranarray([ ... [0.0, 1.25, 3.75, 5.0], ... [2.5, 5.0 , 7.5 , 2.5], ... ]) >>> curve = bezier.Curve(nodes, degree=3) >>> reduced = curve.reduce_() >>> reduced <Curve (degree=2, dimension=2)> >>> reduced.nodes array([[-0.125, 2.5 , 5.125], [ 2.125, 8.125, 2.875]])
- Returns:
The degree-reduced curve.
- Return type:
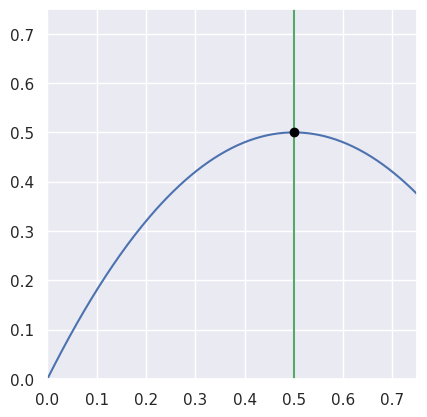
- specialize(start, end)
Specialize the curve to a given sub-interval.
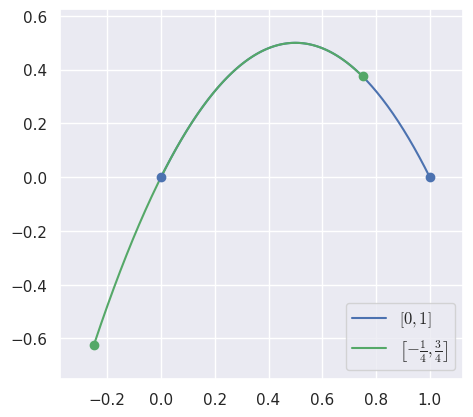
>>> nodes = np.asfortranarray([ ... [0.0, 0.5, 1.0], ... [0.0, 1.0, 0.0], ... ]) >>> curve = bezier.Curve(nodes, degree=2) >>> new_curve = curve.specialize(-0.25, 0.75) >>> new_curve.nodes array([[-0.25 , 0.25 , 0.75 ], [-0.625, 0.875, 0.375]])
This is a generalized version of
subdivide(), and can even match the output of that method:>>> left, right = curve.subdivide() >>> also_left = curve.specialize(0.0, 0.5) >>> bool(np.all(also_left.nodes == left.nodes)) True >>> also_right = curve.specialize(0.5, 1.0) >>> bool(np.all(also_right.nodes == right.nodes)) True
- locate(point)
Find a point on the current curve.
Solves for \(s\) in \(B(s) = p\).
This method acts as a (partial) inverse to
evaluate().Note
A unique solution is only guaranteed if the current curve has no self-intersections. This code assumes, but doesn’t check, that this is true.
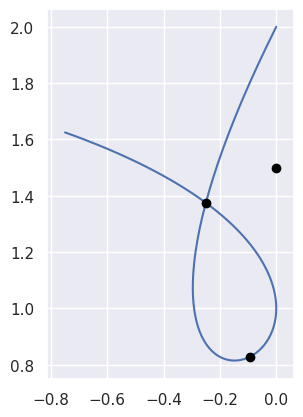
>>> nodes = np.asfortranarray([ ... [0.0, -1.0, 1.0, -0.75 ], ... [2.0, 0.0, 1.0, 1.625], ... ]) >>> curve = bezier.Curve(nodes, degree=3) >>> point1 = np.asfortranarray([ ... [-0.09375 ], ... [ 0.828125], ... ]) >>> curve.locate(point1) 0.5 >>> point2 = np.asfortranarray([ ... [0.0], ... [1.5], ... ]) >>> curve.locate(point2) is None True >>> point3 = np.asfortranarray([ ... [-0.25 ], ... [ 1.375], ... ]) >>> curve.locate(point3) is None Traceback (most recent call last): ... ValueError: Parameters not close enough to one another
- Parameters:
point (numpy.ndarray) – A (
D x 1) point on the curve, where \(D\) is the dimension of the curve.- Returns:
The parameter value (\(s\)) corresponding to
pointorNoneif the point is not on thecurve.- Return type:
- Raises:
ValueError – If the dimension of the
pointdoesn’t match the dimension of the current curve.
- to_symbolic()
Convert to a SymPy matrix representing \(B(s)\).
Note
This method requires SymPy.
>>> nodes = np.asfortranarray([ ... [0.0, -1.0, 1.0, -0.75 ], ... [2.0, 0.0, 1.0, 1.625], ... ]) >>> curve = bezier.Curve(nodes, degree=3) >>> curve.to_symbolic() Matrix([ [ -3*s*(3*s - 2)**2/4], [-(27*s**3 - 72*s**2 + 48*s - 16)/8]])
- Returns:
The curve \(B(s)\).
- Return type:
- implicitize()
Implicitize the curve.
Note
This method requires SymPy.
>>> nodes = np.asfortranarray([ ... [0.0, 1.0, 1.0], ... [2.0, 0.0, 1.0], ... ]) >>> curve = bezier.Curve(nodes, degree=2) >>> curve.implicitize() 9*x**2 + 6*x*y - 20*x + y**2 - 8*y + 12
- Returns:
The function that defines the curve in \(\mathbf{R}^2\) via \(f(x, y) = 0\).
- Return type:
- Raises:
ValueError – If the curve’s dimension is not
2.
- property dimension
The dimension that the shape lives in.
For example, if the shape lives in \(\mathbf{R}^3\), then the dimension is
3.- Type:
- property nodes
The nodes that define the current shape.
- Type: